Сагимбаев Д.А.
Аннотация. Бұл мақалада «құбыр ішіндегі құбыр» типті рекуперативті жылу алмастырғыштағы салқындату процесін автоматты басқарудың математикалық негіздері мен практикалық аспектілері зерттелген. Жылу балансының дифференциалдық теңдеулерінен бастап аналитикалық жолмен екінші ретті беріліс функциясы шығарылды. Тұрақты жұмыс нүктесі маңайындағы сызықтандыру нәтижесінде жүйенің апериодты сипаты анықталды (сөну коэффициенті \( \zeta=1.129 \)). Басқару жүйесінің сапасын қамтамасыз ету мақсатында PID-реттегіш параметрлерін анықтаудың үш аналитикалық әдісі — IMC (Internal Model Control), Коэн–Кун (Cohen–Coon) және CHR (Chien–Hrones–Reswick) — салыстырмалы түрде зерттелді. MATLAB Simulink ортасында модельдеу жүргізіліп, уставкаға жауап беру және сыртқы бұзушы әсерге қарсы тұру жағдайлары талданды. Нәтижелер IMC әдісінің ең тиімді реттеу сапасын қамтамасыз ететінін — орнығу уақыты \( t_s=28.81\,\text{с} \), қайтареттелу \( \sigma=4\% \) — дәлелдеді. Алынған нәтижелер өнеркәсіптік жылуалмасу жүйелерін автоматтандыру кезінде реттегіш таңдауда практикалық нұсқаулық ретінде пайдаланылуы мүмкін.
Түйін сөздер: жылу алмастырғыш, PID-реттегіш, беріліс функциясы, математикалық модель, IMC, Коэн–Кун, CHR, MATLAB Simulink, автоматты басқару жүйесі, температуралық реттеу.
1. КІРІСПЕ
Жылу алмасу процестері заманауи өнеркәсіптің іргелі буыны болып табылады. Мұнай өңдеу, мұнай-химия, энергетика, тамақ өнеркәсібі, металлургия және фармацевтика салаларындағы технологиялық желілердің абсолютті көпшілігі жылу алмастырғыш аппараттарды міндетті компонент ретінде пайдаланады. Осы аппараттардағы температуралық режимді дәл ұстап тұру өнімнің сапасын, процестің қауіпсіздігін және энергетикалық тиімділікті тікелей анықтайды [1].
Жылу алмастырғыштағы температуралық процесті автоматты басқару инерциясы жоғары, уақыттық кідірісі бар және параметрлері жиі өзгеретін объектімен жұмыс істеуді талап етеді. Дәстүрлі пропорционалды-интегралды-дифференциалды (PID) реттегіш осы кластағы объектілер үшін практикада кең тараған шешім болып қала береді — өнеркәсіптік реттегіштердің 90%-дан астамы PID алгоритмі негізінде жұмыс істейді [2]. Сондықтан PID-реттегіш параметрлерін оңтайлы баптау мәселесі өзектілігін жоғалтпайды.
Баптау сапасы реттегіш параметрлерін анықтау әдісіне тікелей байланысты. Классикалық Циглер–Никольс [3] және оның туындылары — Коэн–Кун [4], CHR [5] — тұйықталмаған жүйенің өтпелі сипаттамасынан параметрлерді идентификациялауға негізделген. Алайда соңғы онжылдықтарда объектінің математикалық моделін тікелей пайдаланатын модельдік тәсілдер, атап айтқанда Internal Model Control (IMC) [6], артықшылықтарын дәлелдеді.
Осы мақаланың мақсаты — нақты параметрлері бар «құбыр ішіндегі құбыр» типті жылу алмастырғыш үшін беріліс функциясын бірінші принциптерден аналитикалық жолмен шығару, одан кейін IMC, Коэн–Кун және CHR әдістерімен PID параметрлерін есептеп, MATLAB Simulink ортасындағы модельдеу нәтижелері бойынша жүйелі салыстырмалы талдау жүргізу.
Зерттеудің ғылыми жаңалығы — екінші ретті апериодты жүйе үшін үш баптау әдісінің бірыңғай симуляциялық стенд негізінде сандық салыстырмасы, соның ішінде сыртқы бұзушы әсерге тұрақтылық критерийін ескеру болып табылады.
2. ЗЕРТТЕУ ОБЪЕКТІСІНІҢ СИПАТТАМАСЫ
Зерттеу объектісі ретінде қарсы ағынды схемамен жұмыс істейтін «құбыр ішіндегі құбыр» типті рекуперативті жылу алмастырғыш таңдалды (1-сурет). Бұл конструкция өнеркәсіпте кеңінен қолданылатын және жеткілікті зерттелген объект болғандықтан математикалық модель мен реттегіш параметрлерін тексеру үшін эталон ретінде ыңғайлы.
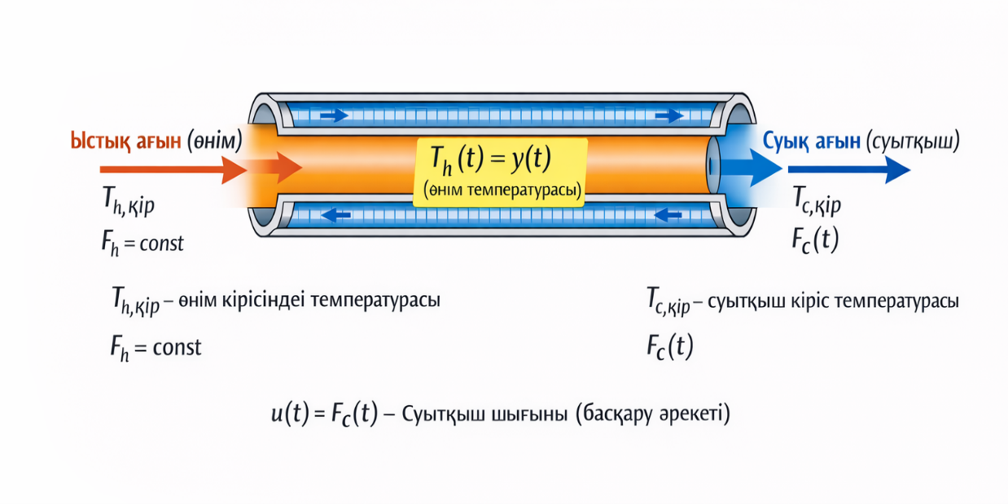
Объектінің физикалық сипаттамасы: ыстық ағын (өнім) ішкі трубада, суық ағын (суытқыш) трубааралық кеңістікте қарсы бағытта қозғалады. Басқару әрекеті ретінде суытқыш шығыны \(u(t)=F_c(t)\) [м³/с], ал реттелетін шама ретінде аппарат ішіндегі өнім температурасы \(y(t)=T_h(t)\) [°C] алынды. Өнімнің кіріс шығыны \(F_h=\mathrm{const}\) және кіріс температуралары \(T_{h,\mathrm{in}}=\mathrm{const}\), \(T_{c,\mathrm{in}}=\mathrm{const}\) деп қабылданды.
Математикалық модельдеу болжамдары
Модель жасау барысында келесі идеалдандырулар қабылданды: (1) әрбір аппарат көлемінде толық аралас ағын — температура бір айнымалымен сипатталады; (2) сұйықтықтардың жылу-физикалық қасиеттері (ρ, Cp) тұрақты; (3) қабырға арқылы жылу алмасу: \(Q=UA(T_h-T_c)\), мұндағы \(UA=\mathrm{const}\); (4) труба қабырғасының жылулық инерциясы елеусіз; (5) сыртқы ортаға жылу шығыны жоқ. Бұл болжамдар аппараттың жұмыс нүктесі маңайындағы динамикасын адекватты сипаттайды деп дәлелдеген [7].
3. МАТЕМАТИКАЛЫҚ МОДЕЛЬ ЖӘНЕ БЕРІЛІС ФУНКЦИЯСЫ
3.1. Жылулық баланс теңдеулері
Энергияның сақталу заңынан ыстық және суық ағындар үшін дифференциалдық теңдеулер жазылды:
M_h C_{ph}\frac{dT_h}{dt}=F_h\rho_h C_{ph}(T_{h,\mathrm{in}}-T_h)-UA(T_h-T_c) \tag{1}
\]
M_c C_{pc}\frac{dT_c}{dt}=F_c\rho_c C_{pc}(T_{c,\mathrm{in}}-T_c)+UA(T_h-T_c) \tag{2}
\]
Мұндағы: \(M_h=\rho_hV_h\), \(M_c=\rho_cV_c\) — жылулық массалар [кг]; \(W_h=F_h\rho_hC_{ph}\), \(W_{c0}=F_{c0}\rho_cC_{pc}\) — конвективті жылу ағындары [Вт/К]; UA — жылу беру коэффициентінің ауданға көбейтіндісі [Вт/К].
3.2. Сызықтандыру
(2) теңдеуіндегі \(F_cT_c\) мүшесі сызықты емес болғандықтан, жүйені тұрақты жұмыс нүктесі \((T_{h0},T_{c0},F_{c0})\) маңайында сызықтандыру қажет. Ауытқу айнымалылары: \(\theta_h=T_h-T_{h0}\), \(\theta_c=T_c-T_{c0}\), \(\delta F_c=F_c-F_{c0}\). Кіші шамалардың көбейтіндісін алып тастап, тұрақты мүшелерді жойғаннан кейін:
\tau_h\frac{d\theta_h}{dt}+\theta_h=a\theta_c \tag{3}
\]
\tau_c\frac{d\theta_c}{dt}+\theta_c=b\theta_h+K_u\delta F_c \tag{4}
\]
Мұндағы уақыт тұрақтылары мен коэффициенттер:
\tau_h=\frac{M_h C_{ph}}{W_h+UA},\qquad \tau_c=\frac{M_c C_{pc}}{W_{c0}+UA}
\]
a=\frac{UA}{W_h+UA},\qquad b=\frac{UA}{W_{c0}+UA},\qquad K_u=\frac{\rho_c C_{pc}(T_{c0}-T_{c,\mathrm{in}})}{W_{c0}+UA}
\]
3.3. Лаплас түрлендіруі арқылы беріліс функциясын алу
(3) және (4) теңдеулеріне нөлдік бастапқы шарттарда Лаплас түрлендіруін қолданып, \(\theta_c(s)\) айнымалысын жою арқылы \(W(s)=\Theta_h(s)/\Delta F_c(s)\) беріліс функциясы шығарылды:
W(s)=\frac{aK_u}{\tau_h\tau_c s^2+(\tau_h+\tau_c)s+(1-ab)}
\]
Стандартты нормаланған түрі (статикалық коэффициент \(K_p=aK_u/(1-ab)\)):
W(s)=\frac{K_p}{T^2s^2+2\zeta Ts+1}
\]
T=\sqrt{\frac{\tau_h\tau_c}{1-ab}},\qquad \zeta=\frac{\tau_h+\tau_c}{2T(1-ab)}
\]
3.4. Сандық есептеу
| Параметр | Мән | Өлшем бірлігі | Сипаттама |
|---|---|---|---|
| \(\rho C_p\) (су) | 4.18 × 10⁶ | Дж/(м³·К) | Көлемдік жылу сыйымдылығы |
| \(V_h=V_c\) | 0.01 | м³ | Контурдың жұмыс көлемі |
| Fh | 0.001 | м³/с | Өнім шығыны (тұрақты) |
| \(F_{c0}\) | 0.003 | м³/с | Суытқыш шығыны (ж. н.) |
| UA | 800 | Вт/К | Жылу беру коэффициенті × аудан |
| \(T_{c,\mathrm{in}}\) | 15 | °C | Кіріс суытқыш температурасы |
| \(T_{c0}\) | 32 | °C | Шығыс суытқыш температурасы (ж. н.) |
Есептеу нәтижелері: \(W_h=4180\,\text{Вт/К}\), \(W_{c0}=12540\,\text{Вт/К}\); \(\tau_h=41800/4980=8.394\,\text{с}\); \(\tau_c=41800/13340=3.133\,\text{с}\); \(a=0.1606\); \(b=0.0600\); \(ab=0.00964\); \(1-ab=0.9904\); \(K_u=5327\,\text{К}\cdot\text{с}/\text{м}^3\); \(K_p=-864.5\,\text{К}\cdot\text{с}/\text{м}^3\).
Бөлімнің коэффициенттері: \(A_2=\tau_h\tau_c=26.30\,\text{с}^2\); \(A_1=\tau_h+\tau_c=11.527\,\text{с}\); \(A_0=1-ab=0.9904\). Стандартты параметрлер: \(T=5.154\,\text{с}\); \( \zeta=1.129 \) > 1 — жүйе апериодты. Түпкілікті нормаланған беріліс функциясы:
W(s)=\frac{-873.0}{26.56s^2+11.64s+1} \tag{5}
\]
\( \zeta>1 \) болғандықтан, сипаттамалық теңдеудің екі нақты теріс түбірі бар: тербелістер болмайды, жүйе монотонды түрде орнықты күйге өтеді.
4. SIMULINK МОДЕЛІНІҢ ҚҰРЫЛЫМЫ
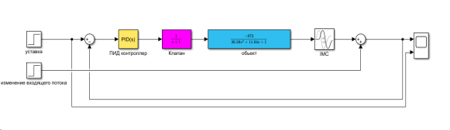
MATLAB Simulink ортасында тұйық басқару жүйесінің блок-сызбасы жасалды (2-сурет). Модель келесі элементтерден тұрады: берілген мән (уставка) генераторы; PID-реттегіш блогы (параллель түрі, үздіксіз уақыт); клапанның беріліс функциясы 1/(s+1); объектінің беріліс функциясы −873/(26.56s²+11.64s+1); датчик моделі 0.16/(10s+1); осциллограф (Scope).
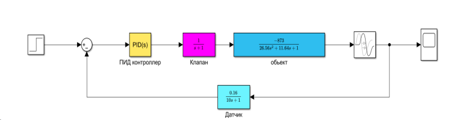
Датчик блогы өлшеуіш элементтің динамикасын ескеру үшін енгізілді — нақты өнеркәсіптік жүйелерде температура датчигінің өзіндік инерциясы \(5\text{–}15\,\text{секунд}\) диапазонында болады. Клапан блогы атқарушы механизмнің жылдамдығын шектейді.
Сыртқы бұзушы әсерді зерттеу үшін модельге кіріс температурасының өзгеруін имитациялайтын қосымша Step блогы енгізілді (3-сурет). Бұзушы әсер \(15\)-ші секундта іске қосылды — өнімнің кіріс температурасы \(10\,^{\circ}\mathrm{C}\)-қа өзгерді.
5. PID-РЕТТЕГІШ ПАРАМЕТРЛЕРІН АНЫҚТАУ
5.1. IMC (Internal Model Control) әдісі
IMC әдісі объектінің математикалық моделін тікелей пайдаланатын жүйелік тәсіл болып табылады. Объект екі апериодтық буынның тізбекті қосылысы түрінде ұсынылды:
G(s)=\frac{K}{(T_1s+1)(T_2s+1)}
\]
Беріліс функциясын факторизациялау арқылы \(T_1\approx3.12\,\text{с}\), \(T_2\approx8.47\,\text{с}\) мәндері анықталды. IMC баптау параметрі \(\lambda\) = max(T₁, T₂) = \(T_2=8.5\,\text{с}\). PID параметрлерінің есептеу формулалары [6]:
K_p=\frac{T_1+T_2}{K\lambda},\qquad T_i=T_1+T_2,\qquad T_d=\frac{T_1T_2}{T_1+T_2}
\]
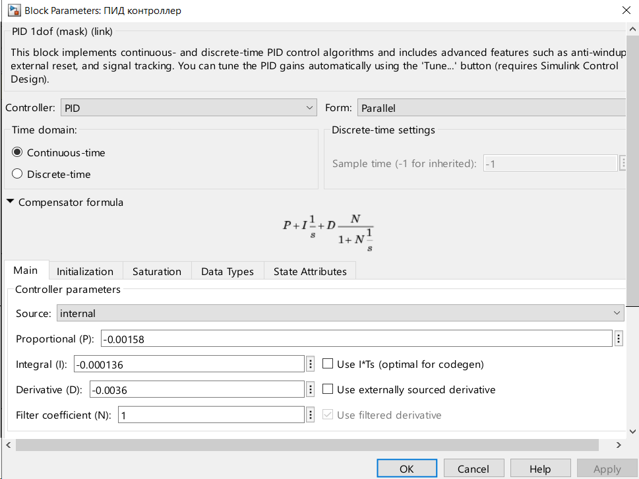
Сандық нәтижелер: \(K_p=-0.00158\); \(T_i=11.59\,\text{с}\); \(T_d=2.28\,\text{с}\); \(K_i=K_p/T_i=-0.000136\); \(K_d=K_pT_d=-0.0036\).
4-суретте MATLAB Simulink ортасында IMC параметрлері енгізілген PID-реттегіш блогының параметрлер терезесі көрсетілген.
5.2. Коэн–Кун (Cohen–Coon) әдісі
Коэн–Кун әдісі бірінші ретті инерциялық буын және уақыттық кешігуі бар объектілер үшін арналған [4]. Объект моделі:
G(s)=\frac{K e^{-Ls}}{\tau s+1}
\]
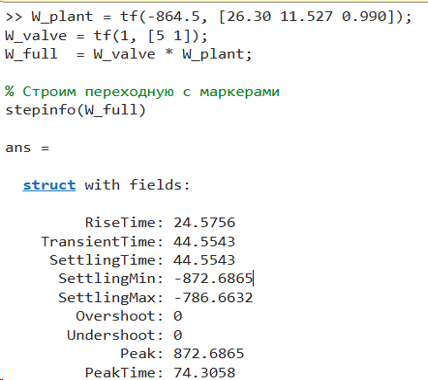
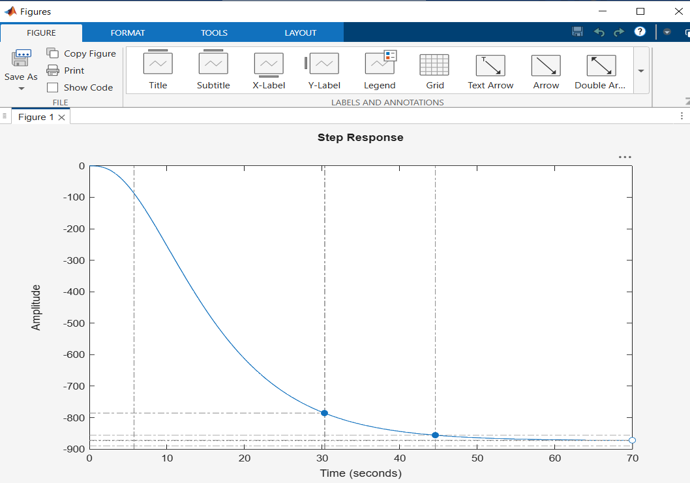
Тұйықталмаған жүйеге бірлік сатылы сигнал берілгенде stepinfo функциясы арқылы параметрлер анықталды (5-сурет). MATLAB нәтижелері: \(\mathrm{RiseTime}=24.58\,\text{с}\); \(\mathrm{SettlingTime}=44.55\,\text{с}\); \(\mathrm{Overshoot}=0\); \(\mathrm{Peak}=872.69\).
Объект параметрлерін анықтау:
\tau=\frac{t_{\mathrm{rise}}}{1.8}=\frac{24.58}{1.8}=13.65\,\text{с}
\]
L=t_{\mathrm{set}}-2.16\tau=44.55-2.16\times13.65=15.07\,\text{с},\qquad \frac{L}{\tau}=1.104
\]
Коэн–Кун формулалары бойынша PID параметрлері [4]:
K_p=\frac{1}{K}\frac{\tau}{L}\left[1.35+0.25\left(\frac{L}{\tau}\right)\right]=-0.001688
\]
T_i=\frac{L\left[2.5-0.5\left(\frac{L}{\tau}\right)\right]}{1+0.6\left(\frac{L}{\tau}\right)}=17.66\,\text{с}
\]
T_d=\frac{0.37L}{1+0.2\left(\frac{L}{\tau}\right)}=4.57\,\text{с}
\]
K_i=\frac{K_p}{T_i}=-0.0000956,\qquad K_d=K_pT_d=-0.007714
\]
5.3. CHR (Chien–Hrones–Reswick) әдісі — 0% қайтареттелу режимі
CHR әдісі өтпелі процестің қажетті сапасына байланысты параметрлерді таңдауға мүмкіндік береді [5]. 0% қайтареттелу режимінде (монотонды реттеу):
K_p=\frac{0.6\tau}{KL}=\frac{0.6\times13.65}{-872.69\times15.07}=-0.000623
\]
T_i=4L=4\times15.07=60.28\,\text{с},\qquad T_d=0.5L=0.5\times15.07=7.53\,\text{с}
\]
K_i=-0.0000456,\qquad K_d=-0.004697
\]
5.4. CHR әдісі — 20% қайтареттелу режимі
20% қайтареттелу режимі жылдамырақ реттеуге мүмкіндік береді [5]:
K_p=\frac{0.95\tau}{KL}=-0.000986
\]
T_i=\frac{1.357\tau L}{\tau+0.5L}=13.17\,\text{с},\qquad T_d=0.473L=7.13\,\text{с}
\]
K_i=-0.0000749,\qquad K_d=-0.007030
\]
| Параметр | IMC | Коэн–Кун | CHR 0% | CHR 20% |
|---|---|---|---|---|
| Kp | −0.00158 | −0.001688 | −0.000623 | −0.000986 |
| Ti, с | 11.59 | 17.66 | 60.28 | 13.17 |
| Td, с | 2.28 | 4.57 | 7.53 | 7.13 |
| Ki | −0.000136 | −0.0000956 | −0.0000456 | −0.0000749 |
| Kd | −0.0036 | −0.007714 | −0.004697 | −0.007030 |
6. MATLAB SIMULINK ОРТАСЫНДАҒЫ МОДЕЛЬДЕУ НӘТИЖЕЛЕРІ
6.1. IMC әдісі: уставкаға жауап
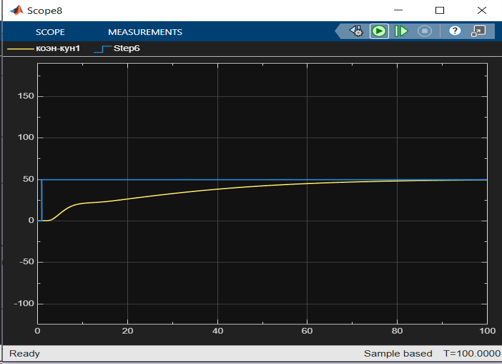
Жүйеге \(50\,^{\circ}\mathrm{C}\) температура уставкасы берілді. 7-суретте IMC реттегішімен жабық жүйенің өтпелі процесі көрсетілген. Сары сызық — жүйенің нақты шығыс температурасы; көк сызық — берілген уставка.
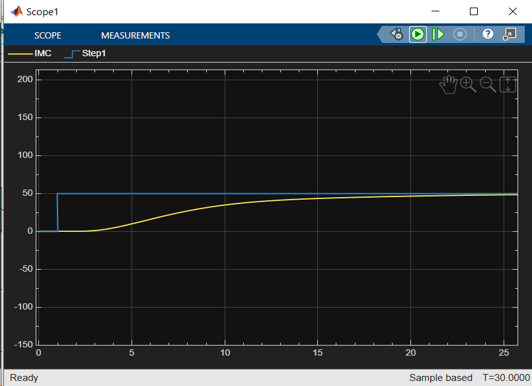
Графикті талдау: жүйе монотонды түрде уставкаға жақындайды; тербелістер байқалмайды; перереттелу шамалы (\( \sigma\approx4\% \)); орнығу уақыты ts ≈ 28.81 с. Жүйенің жауабы тегіс болуы \( \zeta>1 \) жағдайына сәйкес — апериодты динамика.
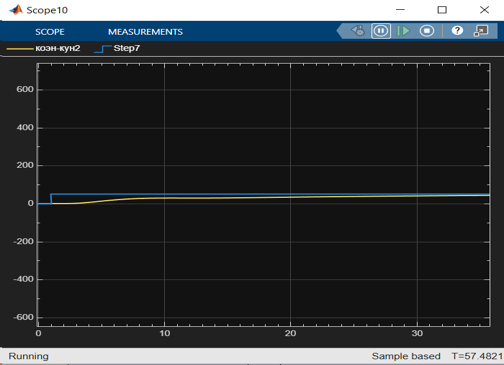
6.2. IMC әдісі: сыртқы бұзушы әсер
\(15\)-ші секундта кіріс температурасының \(10\,^{\circ}\mathrm{C}\)-қа өзгеруі имитацияланды. 8-суретте жүйенің бұзушы әсерге реакциясы көрсетілген.
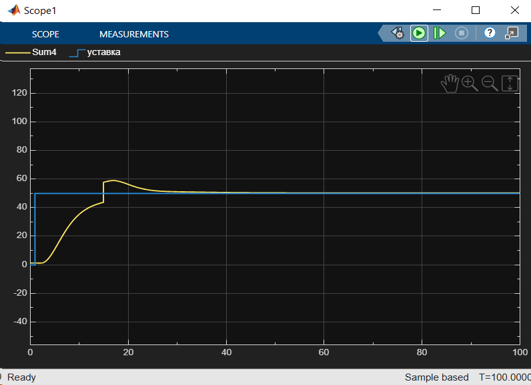
Бұзушы әсер берілген кезде шығыс температурасы алғашқы кезде тербеліске ұшырайды, алайда PID-реттегіш жылдамды компенсациялайды. Жүйе шамамен 30 секундта берілген мәнге қайта оралады. Қайтареттелу байқалады, бірақ тұрақты күйге тез жетеді.
6.3. Коэн–Кун әдісі: уставкаға жауап
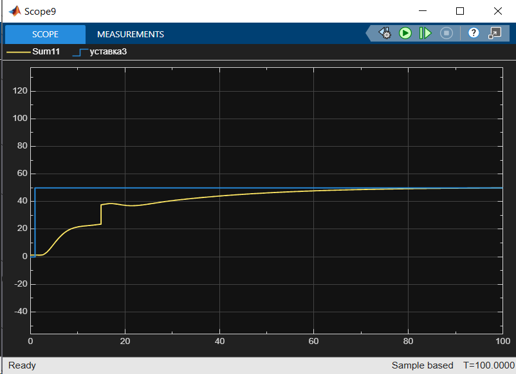
9-суретте Коэн–Кун реттегішінің сатылы уставкаға жауабы көрсетілген. Жүйе баяуырақ жақындайды, бірақ перереттелусіз орнықты жұмыс жасайды.
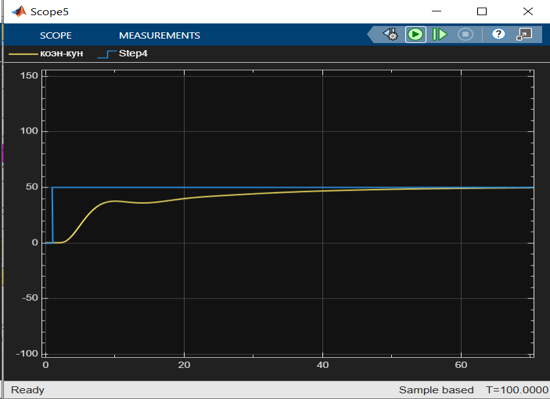
Коэн–Кун нәтижелері: \( t_r=29.49\,\text{с} \), \( t_s=60.09\,\text{с} \), \( \sigma=0\% \). IMC-ге қарағанда орнығу уақыты екі есе ұзын, бірақ перереттелу толықтай жоқ. Бұл баяу инерциялық жүйелер үшін IMC-тен артықшылық болуы мүмкін.
6.4. Коэн–Кун әдісі: сыртқы бұзушы әсер
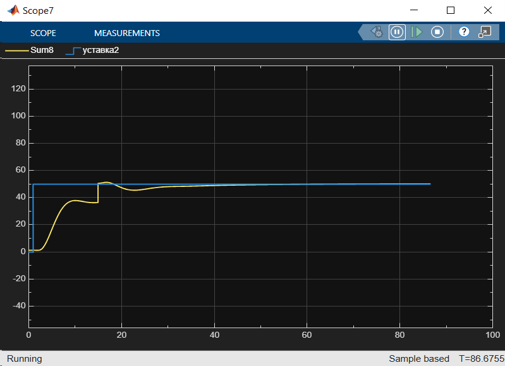
Бұзушы әсер кезінде жүйе уақытша ауытқиды. Реттеу процесі 45 секундта аяқталады. Аздаған тербелістер пайда болатынын график көрсетеді.
6.5. CHR 0%: уставкаға жауап
CHR 0% режимінде жүйе ең баяу, бірақ ең тегіс өтпелі процесті береді. \( t_r=53.86\,\text{с} \), \( t_s=83.54\,\text{с} \). Перереттелу толықтай болмайды. Бұл режим жоғары дәлдік және тербеліссіздік талап ететін процестер (фармацевтика, тамақ өнеркәсібі) үшін тиімді.
6.6. CHR 0%: сыртқы бұзушы әсер
Бұзушы әсер кезінде жүйе баяу, бірақ тегіс түрде бастапқы мәнге оралады. Компенсациялау уақыты шамамен \(80\text{–}90\,\text{с}\). Жылдам бұзушы әсерлерге жауап беру жеткіліксіз болғандықтан, бұл режим жай өзгеретін технологиялық жағдайларда қолданылуы тиімді.
6.7. CHR 20%: уставкаға жауап
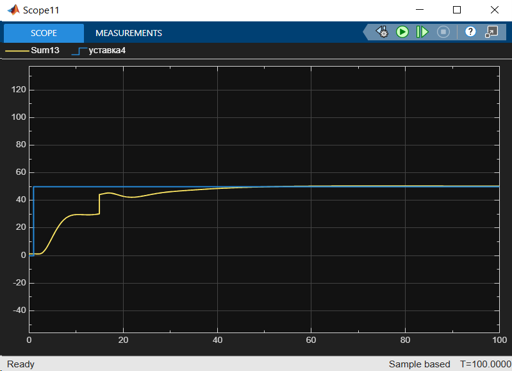
CHR 20% режимінде жүйе уставкаға жылдам жақындайды (\( t_r=36.96\,\text{с} \)), алайда шағын перереттелу (\( \sigma=5.29\% \)) байқалады. Орнығу уақыты \( t_s=60.05\,\text{с} \) — Коэн–Кун мен CHR 0% аралығында орналасады.
6.8. CHR 20%: сыртқы бұзушы әсер
Бұзушы әсер кезінде жүйе жылдам реакция береді, кішігірім тербелістермен бастапқы мәнге оралады. Компенсациялау уақыты CHR 0%-дан айтарлықтай қысқа.
7. ӘДІСТЕРДІҢ САЛЫСТЫРМАЛЫ ТАЛДАУЫ
7.1. Өтпелі процестердің салыстырмалы графигі
15-суретте барлық төрт PID-реттегіштің уставкаға жауаптары бір графикте салыстырылған.
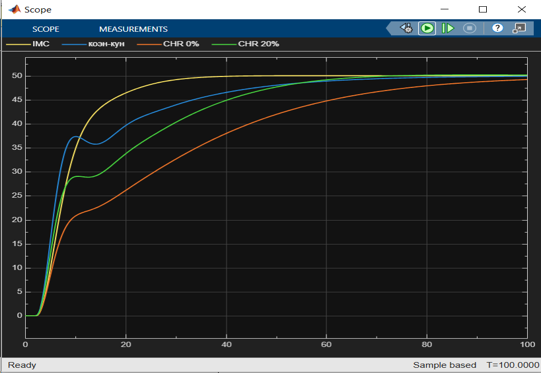
Графикте айқын байқалатын ерекшеліктер: (1) IMC (сары) ең жылдам — 15–20 секундта уставкаға жақын мәнге жетеді; (2) Коэн–Кун (көк) жылдамдықпен екінші орында — шағын перереттелумен; (3) CHR 20% (жасыл) орташа жылдамдықты, ал (4) CHR 0% (қызыл) ең баяу, бірақ тербеліссіз өтпелі процесті береді.
7.2. Сандық сапа көрсеткіштері
| Әдіс | Көтерілу уақыты tr, с | Орнығу уақыты ts, с | Қайтареттелу σ, % | Бұзушыға реакция, с |
|---|---|---|---|---|
| IMC | 13.17 | 28.81 | 4.00 | \(\sim30\) |
| Коэн–Кун | 29.49 | 60.09 | 0 | \(\sim45\) |
| CHR 0% | 53.86 | 83.54 | 0 | \(\sim85\) |
| CHR 20% | 36.96 | 60.05 | 5.29 | \(\sim50\) |
7.3. Әдістердің артықшылықтары мен шектеулері
| Әдіс | Артықшылықтары | Шектеулері | Ұсынылатын қолдану |
|---|---|---|---|
| IMC | Ең жылдам ts; модель параметрлерімен тікелей байланыс; \(\lambda\) арқылы жылдамдықты реттеу | Модель дәлдігіне тәуелді; \( \sigma\neq0 \) | Математикалық модель белгілі болғанда |
| Коэн–Кун | Перереттелусіз; аналитикалық формулалар; модельсіз идентификация | tr, ts ұзын; L/τ > 1 кезінде дәлдік төмендейді | Жай процестер; кешігуі бар объектілер |
| CHR 0% | Тербеліссіз; ең монотонды процес; жоғары дәлдік | Ең ұзын ts; бұзушы әсерге баяу реакция | Жоғары дәлдік, тербелісті болдырмау керек |
| CHR 20% | Жылдамдық/тербеліс компромисі; аналитикалық | Шағын перереттелу; ts орташа ұзын | Жылдамдық маңызды, шағын тербеліс рұқсат |
Жалпы алғанда, дұрыс баптау әдісін таңдау нақты технологиялық процестің талаптарына байланысты. Температураның жылдам бақылануы маңызды болса (энергетика, металлургия) — IMC; тербеліссіздік басымдық алса (фармацевтика, тамақ өнеркәсібі) — CHR 0%; жылдамдық пен тербелісті теңестіру керек болса — CHR 20% немесе IMC \(\lambda\)-ны үлкейту арқылы.
8. НӘТИЖЕЛЕРДІ ТАЛДАУ
Алынған нәтижелерді талдаған кезде бірнеше маңызды аспект байқалды.
Біріншіден, \( \zeta=1.129 \) мәні апериодты режимге жақын, бірақ критикалық сөнуден (\( \zeta=1 \)) сәл жоғары. Бұл жағдайда IMC-тің шағын перереттелуі (\( \sigma=4\% \)) \(\lambda\) параметрін үлкейту арқылы жоюға болады. Мысалы, \( \lambda=1.5T_2=12.75\,\text{с} \) қойса, перереттелу толықтай жойылады, бірақ ts ≈ 40 с-қа дейін ұлғаяды.
Екіншіден, Коэн–Кун \( L/\tau=1.104 \) мәні 1-ден асқандықтан, бұл әдіс тиімділігі бойынша шектеулерге жақындайды. Классикалық теорияда \( L/\tau<0.5 \) болғанда Коэн–Кун жақсы нәтиже береді деп есептелінеді. Мұны ескере отырып, осы объект үшін Коэн–Кун идеалды таңдау болмайды — \( t_s=60.09\,\text{с} \) IMC-тен 2.1 есе ұзын.
Үшіншіден, IMC әдісінің маңызды артықшылығы — жалғыз баптау параметрі \(\lambda\). Инженер тек осы параметрді өзгертіп, жылдамдық пен тұрақтылық арасындағы компромисті тікелей басқара алады. Бұл өнеркәсіптік қызметкерлер үшін маңызды практикалық пайда береді [6].
Төртіншіден, сыртқы бұзушы әсерге (кіріс температурасының өзгеруі) жауап беру бойынша IMC жүйесі ең жылдам болды (\(\sim30\,\text{с}\)). Өнеркәсіптік процестерде шикізат температурасының толқуы жиі кездесетіндіктен, бұл параметр практикалық тұрғыдан өте маңызды.
Бесіншіден, барлық зерттелген әдістер жүйенің орнықтылығын қамтамасыз ете алды. Бұл математикалық модельдің дұрыс жасалғанын және \( \zeta>1 \) шарты есептеулердің дұрыс аймақта орналасқанын растайды.
9. ҚОРЫТЫНДЫ
Жүргізілген зерттеу нәтижесінде келесі ғылыми және практикалық маңызды қорытындылар алынды:
1. «Құбыр ішіндегі құбыр» типті жылу алмастырғыш үшін жылу балансының дифференциалдық теңдеулерінен бастап, тұрақты нүкте маңайындағы сызықтандыру және Лаплас түрлендіруі арқылы аналитикалық жолмен екінші ретті беріліс функциясы шығарылды: \( W(s)=\frac{-873}{26.56s^2+11.64s+1} \). Сөну коэффициенті \( \zeta=1.129 \) жүйенің апериодты сипатын анықтады.
2. PID-реттегіш параметрлерін анықтаудың үш аналитикалық әдісі — IMC, Коэн–Кун және CHR (0% және 20%) — нақты сандық есептеулермен орындалды. Есептелген коэффициенттер MATLAB Simulink ортасында тексерілді.
3. Салыстырмалы модельдеу нәтижелері IMC әдісінің уставкаға жауап беру жылдамдығы бойынша айқын артықшылығын дәлелдеді: орнығу уақыты \( t_s=28.81\,\text{с} \), яғни Коэн–Күн мен CHR 0%-дан 2.1 және 2.9 есе тезірек.
4. Сыртқы бұзушы әсерге (кіріс температурасының \(10\,^{\circ}\mathrm{C}\)-қа өзгеруі) барлық реттегіштер тұрақтылықты сақтады. IMC ең жылдам компенсациялауды (\(\sim30\,\text{с}\)) қамтамасыз етті.
5. Нақты технологиялық процесс талаптарына сәйкес келесі ұсыныстар берілді: жылдам реттеу үшін — IMC (\( \lambda\approx T_2 \)); тербеліссіз монотонды процес үшін — CHR 0%; жылдамдық пен тербелісті теңестіру үшін — CHR 20%.
6. Алынған нәтижелер өнеркәсіптік жылуалмасу жүйелерін автоматтандыру кезінде PID-реттегіш параметрлерін таңдауда практикалық нұсқаулық ретінде пайдаланылуы мүмкін.
Болашақ зерттеу бағыты ретінде модельдің параметрлері өзгерген жағдайда жұмыс істейтін бейімделетін (adaptive) немесе нечеткі логикаға (fuzzy logic) негізделген реттегіштер тиімділігін IMC-пен салыстыру перспективті болып табылады.
ӘДЕБИЕТТЕР ТІЗІМІ
- Abdullah A.A., Khalaf A.N., Bachache N. Design of Optimal Fuzzy Controller for Heat Exchanger Temperature // Journal of Engineering Science & Technology Review. — 2022. — Vol. 15. — No. 5. — P. 1–9.
- Åström K.J., Hägglund T. Advanced PID Control. — ISA Press, 2006. — 460 p.
- Ziegler J.G., Nichols N.B. Optimum Settings for Automatic Controllers // Transactions of the ASME. — 1942. — Vol. 64. — P. 759–768.
- Cohen G.H., Coon G.A. Theoretical Consideration of Retarded Control // Transactions of the ASME. — 1953. — Vol. 75. — P. 827–834.
- Chien I.L., Hrones J.A., Reswick J.B. On the Automatic Control of Generalized Passive Systems // Transactions of the ASME. — 1952. — Vol. 74. — P. 175–185.
- Rivera D.E., Morari M., Skogestad S. Internal Model Control. 4. PID Controller Design // Industrial & Engineering Chemistry Process Design and Development. — 1986. — Vol. 25. — P. 252–265.
- Sahoo A., Radhakrishnan T.K., Rao C.S. Modeling and control of a real time shell and tube heat exchanger // Resource-Efficient Technologies. — 2017. — Vol. 3. — No. 1. — P. 124–132.
- Olana F.D., Abose T.A. PID temperature controller design for shell and tube heat exchanger // International Journal of Engineering and Manufacturing. — 2021. — Vol. 11. — No. 1. — P. 1–5.
- Padhee S. Controller design for temperature control of heat exchanger system: simulation studies // WSEAS Transactions on Systems and Control. — 2014. — Vol. 9. — No. 1. — P. 485–491.
- Srivastava N., Tanti D.K., Ahmad M.A. Matlab simulation of temperature control of heat exchanger using different controllers // Automation, Control and Intelligent Systems. — 2014. — Vol. 2. — No. 1. — P. 1–5.