Тойжігіт Арсен Берікұлы
магистрант, «Автоматтандыру және басқару» кафедрасы
Ғұмарбек Дәукеев атындағы Алматы энергетика және байланыс университеті
(Алматы қ., Қазақстан)
Аңдатпа: Мақалада жылыту жүйесінің қазандық жабдығы үшін автоматты басқару жүйесінің имитациялық моделін әзірлеу және зерттеу мәселелері қарастырылады. Зерттеу нысаны ретінде таза кідірісі бар бірінші ретті апериодтық буын түрінде сипатталатын температура реттеу контуры алынды; оның беріліс функциясы \( W(s)=\frac{2{,}1e^{-25s}}{120s+1} \) түрінде анықталды. Классикалық Зиглер–Никольс (ЗН) және Коэн–Кун (КК) баптау әдістерімен П, ПИ және ПИД-реттегіштер параметрлері аналитикалық жолмен есептелді. MATLAB ортасында бағдарламалық модельдеу жүргізіліп, MATLAB/Simulink-те визуалды имитациялық схема құрылды. ЗН ПИД-реттегіші ең жылдам реттеу уақытын (\( t_{p}=120\,\text{с} \)) қамтамасыз ететіні, КК ПИД-реттегіші тербелісті азайтатыны анықталды. Сыртқы әсерлер кезіндегі жүйенің жоғары сенімділігі расталды; барлық реттегіштер статикалық қатені толығымен жояды (\( \Delta \approx 0\,^{\circ}\mathrm{C} \)).
Кілт сөздер: қазандық, ПИД-реттегіш, имитациялық модель, MATLAB/Simulink, Зиглер–Никольс, Коэн–Кун, беріліс функциясы, өтпелі процесс, автоматты басқару жүйесі, жылыту жүйесі.
Кіріспе
Қазіргі энергетика саласы өндірістік үдерістердің цифрлануы, энергия тиімділігін арттыру және қоршаған ортаға әсерді азайту талаптарымен байланысты терең технологиялық өзгерістер кезеңінде тұр. Осы жағдайда жылу техникалық жабдықтардың, соның ішінде қазандық қондырғыларының сапалы жұмыс істеуі ерекше маңызды. Қазандық – жану, жылу алмасу, фазалық ауысу, шығындар мен қысымды реттеу сияқты бірнеше үдеріс қатар жүретін күрделі динамикалық объект. Бұл процестердің инерциясы, бейсызық қасиеттері және сыртқы әсерлерге сезімталдығы бар, сондықтан қазандықты басқару физикалық үдерістерді терең түсінуді және заманауи автоматтандыру әдістерін қажет етеді [1, 2].
Дәстүрлі басқару тәсілдері, мысалы, реттегіш параметрлерін тәжірибелік жолмен таңдау, жабдықтың штаттан тыс режимдегі әрекетін алдын ала бағалауға немесе көпконтурлы басқару схемелерін тексеруге мүмкіндік бермейді. Сондықтан соңғы жылдары қазандық процестерінің динамикасын компьютерде қайта жаңғыртуға мүмкіндік беретін имитациялық модельдеу әдістері кеңінен қолданылуда. Бұл әдіс жүйенің тұрақтылығын, реттеу сапасын талдауға, жаңа басқару алгоритмдерін сынауға мүмкіндік береді [3, 4].
Зерттеудің мақсаты – қазандық жабдығының температура реттеу контуры үшін автоматты басқару жүйесінің математикалық моделін әзірлеу, ПИД-реттегішті оңтайлы баптау және MATLAB/Simulink ортасында жүйенің жұмысқа қабілеттілігін зерттеу.
Қойылған мақсатқа жету үшін келесі міндеттер шешілді:
- зерттеу объектісі ретінде қазандықтың температура реттеу контурын бөліп алу және параметрлерін анықтау;
- объектінің математикалық моделін (беріліс функциясын) дифференциалдық теңдеу түрінде және Лаплас кеңістігінде құру;
- Зиглер–Никольс және Коэн–Кун әдістерін қолдана отырып, П, ПИ және ПИД-реттегіштердің параметрлерін есептеу;
- MATLAB ортасында математикалық модельдеу жүргізу және өтпелі процестердің графиктерін тұрғызу;
- сыртқы әсерлер кезіндегі жүйенің реакциясын зерттеу;
- MATLAB/Simulink ортасында визуалды имитациялық модель құру.
Зерттеудің ғылыми жаңалығы – жылыту жүйесінің нақты параметрлеріне сәйкес анықталған температура реттеу контурында классикалық баптау әдістерін (ЗН және КК) жүйелі түрде салыстыру, реттеу сапасының көрсеткіштерін сандық бағалау және MATLAB/Simulink ортасында толық имитациялық модель құру.
Материалдар мен әдістер
Зерттеу нысаны — жылыту жүйесінің қазандығы
Зерттеу үшін жылыту жүйесінің нақты жабдықтарына сәйкес келетін типтік параметрлері бар температура реттеу контуры алынды. Жылыту жүйесінің жұмыс принципі: қазандық бөлмеге немесе жылу тасымалдағышқа белгілі бір мөлшерде жылу береді, бөлмедегі температура датчигі нақты температураны өлшеп оны берілген мәнмен салыстырады. Ауытқу болған жағдайда реттегіш басқару сигналын шығарып, қазандықтың қуатын өзгертеді. Нысанның типтік параметрлері 1-кестеде берілген.
| Параметр | Белгіленуі | Мәні | Өлшем бірлігі | Физикалық мағынасы |
|---|---|---|---|---|
| Күшейту коэффициенті | \( k \) | 2,1 | \( ^{\circ}\mathrm{C}/\% \) | Сигнал 1%-ға өзгергенде температура өзгерісі |
| Уақыт тұрақтысы | \( T \) | 120 | с | Жүйенің инерциясы |
| Кідіріс уақыты | \( \tau \) | 25 | с | Жылудың датчикке жету уақыты |
Объектінің математикалық моделі
Динамикалық қасиеттері бойынша қазандықтың температура контуры таза кідірісі бар бірінші ретті апериодтық буын ретінде сипатталады — бұл жылу процестерін модельдеуде кеңінен таралған тәсіл. Объектінің дифференциалдық теңдеуі [5]:
\[
T\frac{dy(t)}{dt}+y(t)=k\,u(t-\tau)
\]
мұндағы: \( y(t) \) — реттелетін шама (температура), \( ^{\circ}\mathrm{C} \); \( u(t) \) — басқару сигналы (қазандық қуаты), %; \( T \) — уақыт тұрақтысы, \( T=120\,\text{с} \); \( k \) — күшейту коэффициенті, \( k=2{,}1\,^{\circ}\mathrm{C}/\% \); \( \tau \) — кідіріс уақыты, \( \tau=25\,\text{с} \).
Лаплас түрлендіруін қолданып, объектінің беріліс функциясын аламыз:
\[
W(s)=\frac{Y(s)}{U(s)}=\frac{k e^{-\tau s}}{Ts+1}=\frac{2{,}1e^{-25s}}{120s+1}
\]
Кідіріс буынын \( e^{-\tau s} \) MATLAB-та модельдеу үшін екінші ретті Паде жуықтауы қолданылды [6]:
\[
e^{-\tau s}\approx \frac{1-\frac{\tau s}{2}+\frac{(\tau s)^2}{12}}{1+\frac{\tau s}{2}+\frac{(\tau s)^2}{12}}
\]
ПИД-реттегіш және оны баптау әдістері
Өнеркәсіпте ең көп қолданылатын реттегіш — ПИД-реттегіш (пропорционалды-интегралды-дифференциалды). Оның уақыт кеңістігіндегі теңдеуі:
\[
u(t)=K_p\left(e(t)+\frac{1}{T_i}\int_{0}^{t}e(\xi)\,d\xi+T_d\frac{de(t)}{dt}\right)
\]
мұндағы: \( e(t) \) — реттеу қателігі; \( K_p \) — пропорционалды коэффициент; \( K_i=\frac{K_p}{T_i} \) — интегралды коэффициент; \( K_d=K_pT_d \) — дифференциалды коэффициент.
Параметрлерді есептеу үшін екі классикалық әдіс қолданылды. Зиглер–Никольс (ЗН) әдісі ашық контурдағы өтпелі сипаттама бойынша баптауға сүйенеді. Қолдану шарты:
\[
0{,}15<\frac{\tau}{T}<0{,}6
\]
Тексерсек:
\[
\frac{\tau}{T}=\frac{25}{120}=0{,}2083
\]
шарт орындалады. Коэн–Кун (КК) әдісі кідіріс уақыты үлкен объектілер үшін ЗН-ге қарағанда жақсы нәтиже береді, \( \tau/T>0{,}2 \) болғанда ерекше тиімді. Есептеуді жеңілдету үшін \( r=\tau/T=0{,}2083 \) қатынасы енгізіледі.
Нәтижелер
Реттегіш параметрлерін есептеу
Зиглер–Никольс және Коэн–Кун формулалары бойынша барлық реттегіш типтері үшін параметрлер есептелді. Нәтижелер 2-кестеде жинақталған.
| Параметр | ЗН П | ЗН ПИ | ЗН ПИД | КК П | КК ПИ | КК ПИД |
|---|---|---|---|---|---|---|
| \( K_p \) | 2,2857 | 2,0571 | 2,7429 | 2,4444 | 2,0968 | 3,1667 |
| \( T_i \), с | — | 83,25 | 50,00 | — | 58,15 | 56,68 |
| \( T_d \), с | — | — | 12,50 | — | — | 8,76 |
| \( K_i \) | — | 0,02471 | 0,05486 | — | 0,03606 | 0,05587 |
| \( K_d \) | — | — | 34,286 | — | — | 27,737 |
Зиглер–Никольс ПИД-реттегішінің беріліс функциясы:
\[
W_{\mathrm{PID,ZN}}(s)=K_p\left(1+\frac{1}{T_i s}+T_d s\right)
=2{,}7429\left(1+\frac{1}{50s}+12{,}5s\right)
=\frac{34{,}286s^2+2{,}7429s+0{,}05486}{s}
\]
Коэн–Кун ПИД-реттегішінің беріліс функциясы:
\[
W_{\mathrm{PID,CC}}(s)=3{,}1667\left(1+\frac{1}{56{,}68s}+8{,}76s\right)
=\frac{27{,}737s^2+3{,}1667s+0{,}05587}{s}
\]
Объектінің өтпелі сипаттамасы
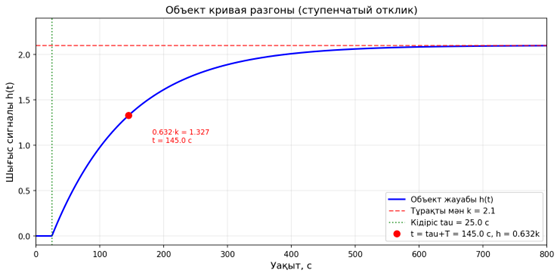
Ең алдымен объектінің өзінің (реттегішсіз) сипаттамасы зерттелді. Сигнал берілгеннен кейін алғашқы 25 секундта (\( \tau=25\,\text{с} \)) ешқандай өзгеріс болмайды — таза кідіріс. Одан кейін температура экспоненциалды заңдылықпен өсіп, тұрақты мәнге (\( k=2{,}1 \)) ұмтылады. \( t=\tau+T=145\,\text{с} \) уақытта шығыс мәні \( 0{,}632\cdot k=1{,}327 \)-ге жетеді — бұл уақыт тұрақтысын анықтаудың стандартты тәсілі [7].
ПИ және ПИД-реттегіштерінің жұмысын салыстыру
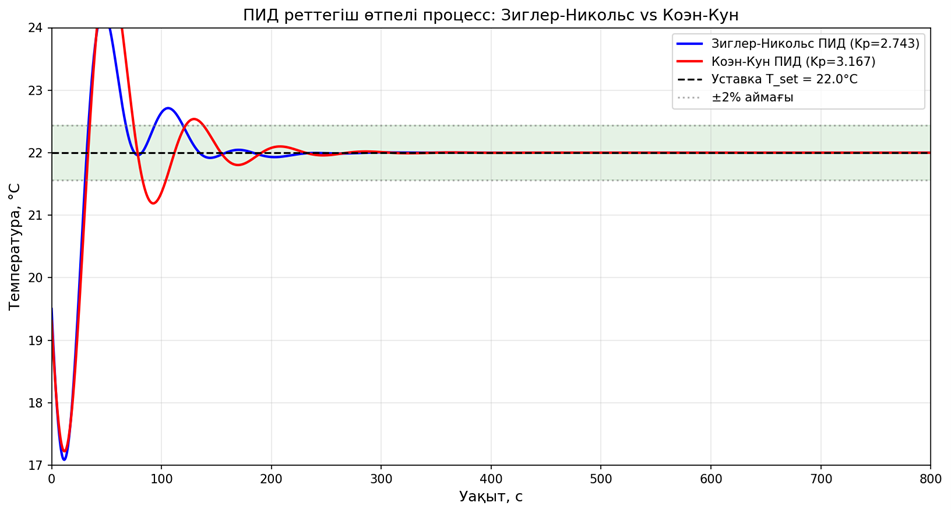
Жүйеге ПИД-реттегішті қосқан кездегі жабық контурдың жұмысы зерттелді. Бөлме температурасын 18 °C-тан 22 °C-қа дейін көтеру тапсырмасы (уставка) берілді. Зиглер–Никольс және Коэн–Кун ПИД-реттегіштері салыстырылды: ЗН (көк сызық) жылдамырақ жауап береді, бірақ артық реттеу байқалады; КК (қызыл сызық) сәл баяуырақ, бірақ тербелістері тезірек басылады.
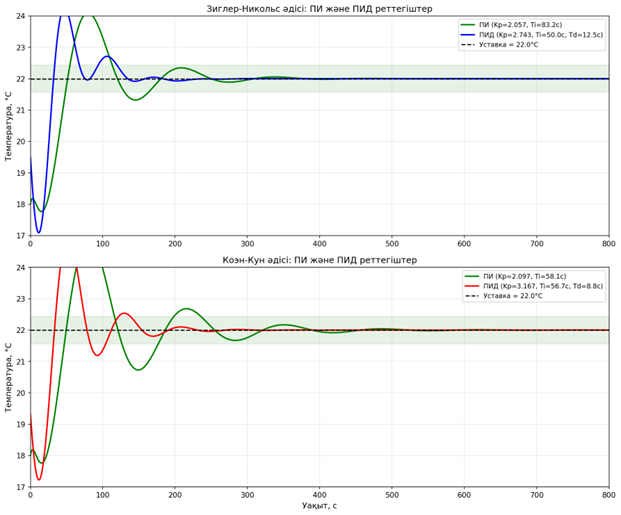
Реттеу сапасының негізгі көрсеткіштері 3-кестеде берілген.
| Реттегіш | Артық реттеу \( \sigma \), % | Реттеу уақыты \( t_p \), с | Статикалық қате \( \Delta \), °C |
|---|---|---|---|
| ЗН П | 0 | — | \( \ne 0 \) |
| ЗН ПИ | 52,5 | 163 | \( \approx 0 \) |
| ЗН ПИД | 56,5 | 120 | \( \approx 0 \) |
| КК П | 0 | — | \( \ne 0 \) |
| КК ПИ | 38,2 | 236 | \( \approx 0 \) |
| КК ПИД | 42,1 | 138 | \( \approx 0 \) |
Ескерту: П-реттегіш интегралды буынсыз болғандықтан статикалық қатені жоя алмайды; реттеу уақыты өлшенбейді.
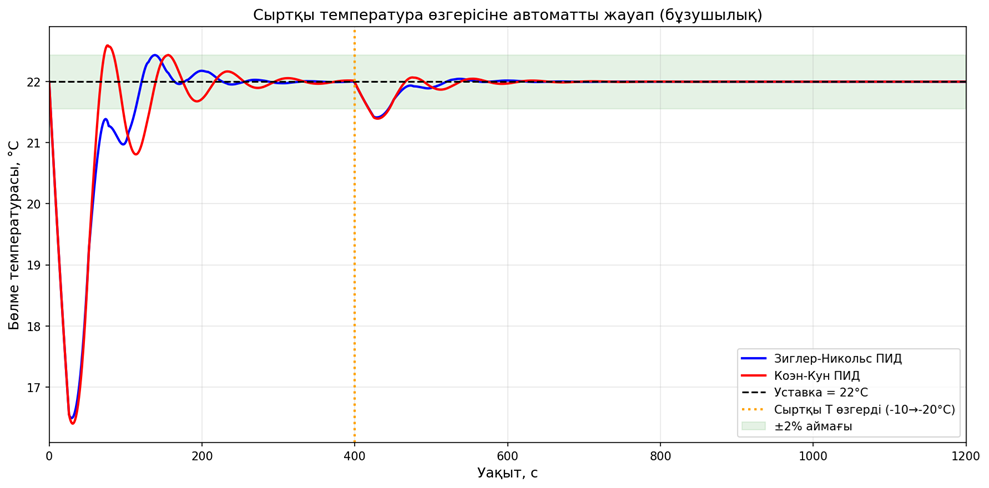
Сыртқы ауытқу әсерін зерттеу
Қазандық жұмысындағы маңызды мәселе — ауа-райының күрт өзгеруі сияқты сыртқы әсерлер. \( t=400\,\text{с} \)-та сыртқы температураның −10 °C-тан −20 °C-қа күрт төмендеуі енгізілді. Әсер болған сәтте бөлме температурасы да түсе бастайды, алайда ПИД-реттегіш ауытқуды тез байқап, қазандық қуатын арттырады. Жүйе 22 °C мәніне сенімді оралады, бұл автоматты басқару жүйесінің жоғары тиімділігін дәлелдейді.
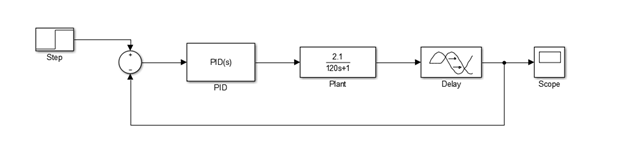
MATLAB/Simulink имитациялық моделі
MATLAB/Simulink ортасында визуалды модель келесі негізгі блоктардан тұрады:
- Step (Sources) — уставка (керекті температура) беріліс үшін. Параметрлер: Step time = 0, Initial = 18, Final = 22;
- Sum (Math Operations) — қателікті есептеу. Таңбалары «+ −»;
- PID Controller (Continuous) — реттегіш. ЗН параметрлері: \( P=2{,}7429 \), \( I=0{,}05486 \), \( D=34{,}286 \);
- Transfer Fcn (Continuous) — қазандық объектісі. Числитель [2.1], знаменатель [120 1];
- Transport Delay (Continuous) — кідіріс блогы. Delay time = 25;
- Scope (Sinks) — нәтижені (графикті) бақылау.
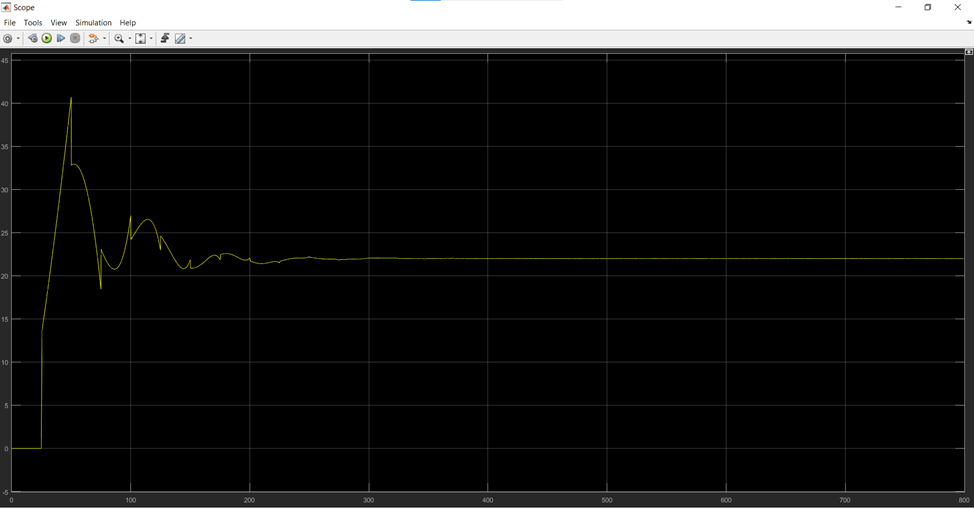
Барлық блоктар тізбектей жалғанып, Transport Delay шығысынан Sum блогының теріс кірісіне кері байланыс тартылды. Simulink схемасы мен параметрлер баптау терезесі 5-суретте, реттеу нәтижесі 6-суретте берілген.
Талдау
Алынған нәтижелерді талдау бірнеше маңызды қорытынды береді. ПИД-реттегіш ПИ-реттегішке қарағанда реттеу уақытын айтарлықтай қысқартады: ЗН ПИД 163 с орнына 120 с-та реттейді, яғни 26%-ға жылдамырақ. КК ПИД-реттегіші артық реттеуді азайтады (\( \sigma=42{,}1\% \)), бұл индустриялық қазандықтарда жабдықты шамадан тыс механикалық жүктемеден қорғау тұрғысынан артықшылық береді [8].
Барлық ПИ және ПИД-реттегіштер статикалық қатені толығымен жояды (\( \Delta \approx 0\,^{\circ}\mathrm{C} \)) — бұл интегралды буынның іргелі артықшылығы. Жүйе сыртқы әсерлерға (ауа-райы өзгерісіне) тұрақты екені дәлелденді; бұл автоматты жылыту жүйелерінде маңызды қасиет.
MATLAB/Simulink ортасында құрылған визуалды модель нақты жабдыққа жаңа алгоритмдерді сынамай тұрып, виртуалды зертхана рөлін атқарады.
Зерттеудің шектеуі — объект параметрлері тәжірибелік деректерден емес, типтік мәндерден алынды. Болашақта нақты қазандықтан алынған деректер негізінде модельді идентификациялау және адаптивті баптау алгоритмдерін (мысалы, Model Predictive Control) тестілеу жоспарланады [9].
Қорытынды
Жұмыс барысында келесі негізгі нәтижелерге қол жеткізілді:
- Қазандықтың жылыту контурының динамикалық параметрлері анықталып, беріліс функциясы \( W(s)=\frac{2{,}1e^{-25s}}{120s+1} \) түрінде құрылды.
- ЗН және КК классикалық әдістерімен П, ПИ, ПИД-реттегіштер параметрлері есептелді. ЗН ПИД: \( K_p=2{,}7429 \), \( T_i=50\,\text{с} \), \( T_d=12{,}5\,\text{с} \); КК ПИД: \( K_p=3{,}1667 \), \( T_i=56{,}68\,\text{с} \), \( T_d=8{,}76\,\text{с} \).
- MATLAB ортасындағы модельдеуде ЗН ПИД ең жылдам жауап береді (\( t_p=120\,\text{с} \), \( \sigma=56{,}5\% \)); КК ПИД артық реттеуді азайтады (\( t_p=138\,\text{с} \), \( \sigma=42{,}1\% \)); барлық ПИ және ПИД-реттегіштер статикалық қатені жояды (\( \Delta\approx0\,^{\circ}\mathrm{C} \)).
- Сыртқы әсерлер (ауа-райының күрт өзгеруі) кезінде автоматты жүйе жайлы температураны сенімді сақтап қалады — бұл жүйенің жоғары тиімділігін растайды.
- MATLAB/Simulink ортасында толық визуалды имитациялық модель құрылды; ол болашақта жаңа алгоритмдерді сынауға арналған виртуалды зертхана рөлін атқарады.
Практикалық ұсыныс: ЗН ПИД жылдам реттеу қажет жүйелер үшін, КК ПИД — тұрақты жұмыс режимі маңызды өнеркәсіптік жылыту жүйелері үшін ұсынылады. Модель нақты жағдайларға бейімдеу арқылы прототип ретінде қолданылуы мүмкін.
Әдебиеттер тізімі
- Huang C., Zheng Y., Zhao H., et al. Intelligent Deep Learning Modeling and Multi-Objective Optimization of Boiler Combustion System in Power Plants // Processes. – 2025. – Vol. 13, No. 3. – P. 1–18.
- Yuan Han, Chao Wang, et al. Simulation of Dynamic Characteristics of Supercritical Boiler Based on Coupling Model of Combustion and Hydrodynamics // Energies. – 2024. – Vol. 17, No. 8. – P. 1–22.
- Yan M., Lu C., Shi P., et al. Optimizing Two-Phase Flow Heat Transfer: DCS Hybrid Modeling and Automation in Coal-Fired Power Plant Boilers // Frontiers in Heat and Mass Transfer. – 2024. – Vol. 2. – P. 1–15.
- Bystrova C., Djuzbayeva B., Akishev T., et al. Modeling the Process of Steam Pressure Control in a Boiler Unit // Bulletin of Abai KazNPU. Series of Physical and Mathematical Sciences. – 2025. – No. 1. – P. 45–54.
- Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. — М.: Горячая линия-Телеком, 2009. — 608 с.
- Дьяконов В.П. MATLAB 6.5 SP1/7.0 + Simulink 5/6. Основы применения. — М.: СОЛОН-Пресс, 2005. — 800 с.
- Ziegler J.G., Nichols N.B. Optimum settings for automatic controllers // Trans. ASME. – 1942. – Vol. 64. – P. 759–768.
- Cohen G.H., Coon G.A. Theoretical consideration of retarded control // Trans. ASME. – 1953. – Vol. 75. – P. 827–834.
- Астром К.Й., Хагглунд Т. ПИД-регуляторы: теория, проектирование и настройка. — М.: Наука, 1995. — 224 с.
- Жусупбеков С.С., Сабырова А.Б. Автоматты басқару теориясы. — Алматы: ҚазҰТУ баспасы, 2023. — 74 б.
- Дорф Р., Бишоп Р. Современные системы управления. — М.: Лаборатория Базовых Знаний, 2004. — 832 с.
- Dou J., Wen Z. Boiler combustion modeling and optimization based on reinforcement learning algorithm // Discover Applied Sciences. – 2025. – Vol. 7, No. 1. – P. 1–14.
РАЗРАБОТКА И ИССЛЕДОВАНИЕ ИМИТАЦИОННОЙ МОДЕЛИ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОТЕЛЬНЫМ ОБОРУДОВАНИЕМ
Тойжігіт Арсен Берікұлы
магистрант, Алматинский университет энергетики и связи им. Г. Даукеева, Алматы, Казахстан, a.toizhigit@aues.kz
Утепбергенов Ирбулат Туремуратович
д.т.н., профессор, Алматинский университет энергетики и связи им. Г. Даукеева, Алматы, Казахстан, i.utepbergenov@aues.kz
Аннотация. В статье рассматриваются вопросы разработки и исследования имитационной модели системы автоматического управления для контура регулирования температуры котельного оборудования. Объектом исследования выступает контур регулирования температуры, описываемый апериодическим звеном первого порядка с чистым запаздыванием: \( W(s)=\frac{2{,}1e^{-25s}}{120s+1} \). Аналитическим методом рассчитаны параметры П, ПИ и ПИД-регуляторов по классическим методам Зиглера–Никольса (ЗН) и Коэна–Куна (КК). В среде MATLAB/Simulink построена визуальная имитационная модель. Установлено, что ЗН ПИД-регулятор обеспечивает наименьшее время регулирования (\( t_p=120\,\text{с} \)), а КК ПИД-регулятор снижает перерегулирование. Подтверждена высокая помехоустойчивость системы при внешних возмущениях; все ПИ и ПИД-регуляторы полностью устраняют статическую ошибку (\( \Delta \approx 0\,^{\circ}\mathrm{C} \)).
Ключевые слова: котёл, ПИД-регулятор, имитационная модель, MATLAB/Simulink, Зиглер–Никольс, Коэн–Кун, передаточная функция, переходной процесс, система автоматического управления.
DEVELOPMENT AND RESEARCH OF A SIMULATION MODEL OF AN AUTOMATIC CONTROL SYSTEM FOR BOILER EQUIPMENT
Toizhigit Arsen Berikuly
Master degree student, Almaty University of Power Engineering and Telecommunications named after Gumarbek Daukeyev, Almaty, Kazakhstan, a.toizhigit@aues.kz
Utepbergenov Irbulat Turemuratovich
Dr.Sc., Professor, Almaty University of Power Engineering and Telecommunications named after Gumarbek Daukeyev, Almaty, Kazakhstan, i.utepbergenov@aues.kz
Abstract. This paper addresses the development and investigation of a simulation model for an automatic control system applied to the temperature regulation loop of boiler equipment. The research object is a temperature control loop described as a first-order aperiodic element with pure delay: \( W(s)=\frac{2.1e^{-25s}}{120s+1} \). Parameters of P, PI, and PID controllers are calculated analytically using the classical Ziegler–Nichols (ZN) and Cohen–Coon (CC) tuning methods. A visual simulation model is built in MATLAB/Simulink. It is established that the ZN PID controller provides the shortest settling time (\( t_p=120\,\text{s} \)), while the CC PID controller reduces overshoot. High robustness of the system against external disturbances is confirmed; all PI and PID controllers eliminate the steady-state error completely (\( \Delta \approx 0\,^{\circ}\mathrm{C} \)).
Keywords: boiler, PID controller, simulation model, MATLAB/Simulink, Ziegler–Nichols, Cohen–Coon, transfer function, transient response, automatic control system.